
Data Strategy for Robot Training: Teleoperation vs Simulation vs Human Video for Integrated AI

Creating a robot policy that works in the real world is no longer a computer problem — it’s a data problem. Integrated AI teams have three options for developing their models: teleworking, simulation, and human video. Each comes with a different cost curve, a different reliability profile, and a different ceiling on what your robot can eventually learn. Choosing the wrong primary source can burn six months and a seven-figure budget before you get it. This guide breaks down each data source AI contains, where it wins, where it fails, and how to integrate it into a production-grade robot training data strategy.
Key Takeaways
- Teleoperation produces more reliable data but is capped at 5-50 episodes per operator hour.
- Simulation produces millions of episodes cheaply but presents a sim-to-real gap that fails in contact-rich jobs.
- Human video measures effort but lacks robotic action labels and carries a matching gap.
- A recent study shows that about 8 simulation samples yield 1 sample value that works on the phone for in-domain operations.
- Most AI pipelines combine all three sources rather than choosing just one.
Why is data a bottleneck for embedded AI?
Data is a bottleneck in hybrid AI because paired sensor data is not at internet scale. The language model can import billions of text tokens extracted from the web. The robot policy requires synchronized joint angles, grip forces, camera frames, and work context – all recorded during body manipulation. None of this is available for free.
The scale gap is tight. More than 3.9 million industrial robots are working worldwide (IFR World Robotics, 2024), but the largest open dataset of robot manipulation contains about one million episodes (Open X-Embodiment, Padalkar et al., 2023). Hardware is everywhere; data is missing. Every new personalization – one-arm manipulator, bimanual humanoid, mobile base with one arm – effectively resets data requirements because policies trained in one method rarely transfer cleanly to another.
Gap of embodiment: The loss of performance that occurs when a policy trained on the physical configuration of one robot is used by a different robot.
This is why robotics teams are now thinking in terms of data strategy, not just data collection. The right mix of telework, simulation, and human video explains what your model can do, how fast it ships, and how much it costs to get there.
What is teleoperation data and when does it win?
Teleoperation data is recorded when a human operator controls the robot in real time with the leader’s arm, VR headset, exoskeleton, or wrist-mounted interface, while the system records all joint angles, force readings, and camera frames synchronously.
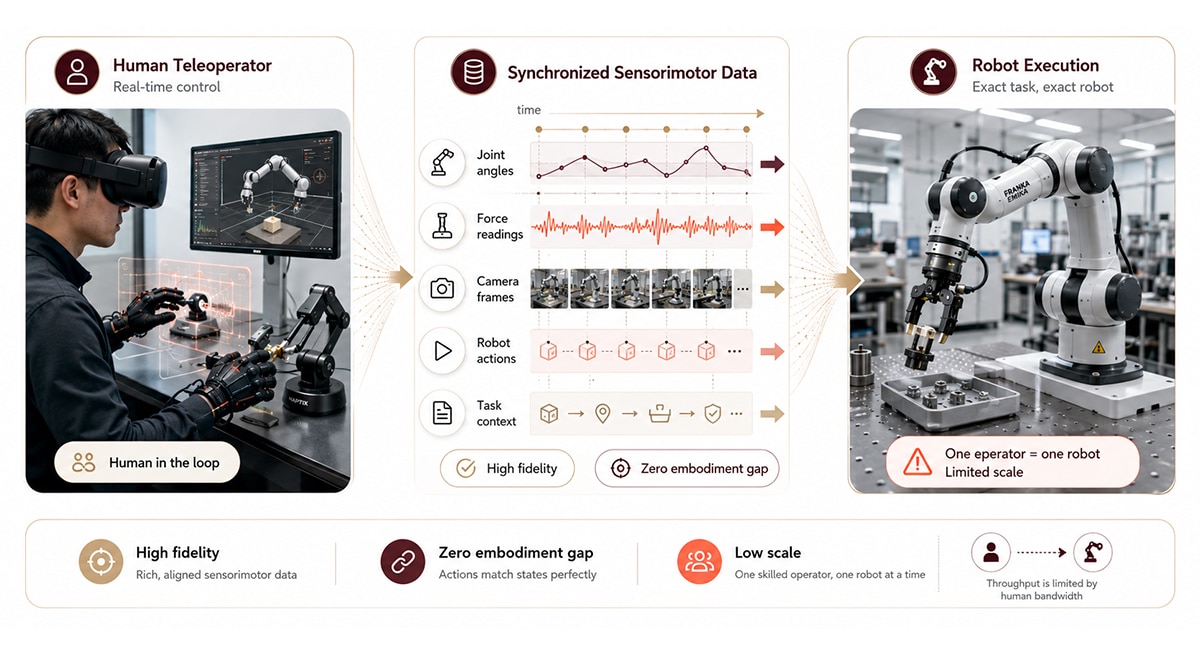
Teleoperation: Real-time human control of a robot with synchronized sensor data recorded during manipulation.
Teleoperation honestly wins. Because the data is generated by a skilled person doing the work directly to the robot, the action-state correspondence is perfect and the matching gap is zero. Learning through simulation, behavioral modeling, and policy optimization all benefit from clean teleop demonstrations.
Costs appear on the scale. A skilled teleoperator produces 5-50 episodes per hour depending on the complexity of the job, and the rate drops as the operators get tired. One robot, one operator – that’s the ceiling, which is why open platforms like ALOHA, UMI, and exoskeleton-based humanoid instruments (AgiBot, Fourier GR-1) are all focused on cost reduction instead of scaling up.
Shaip’s Physical AI data services work with teleoperation cells alongside multi-objective workflows so that teams of robots don’t need to build operator pipelines from scratch.
What is simulation data and where does it measure?
Simulation data is generated by physics engines – MuJoCo, NVIDIA Isaac Sim, Isaac Lab, PyBullet – that provide virtual robots that perform tasks in thousands of similar scenarios. A single GPU cluster can produce millions of episodes overnight at close to zero cost.
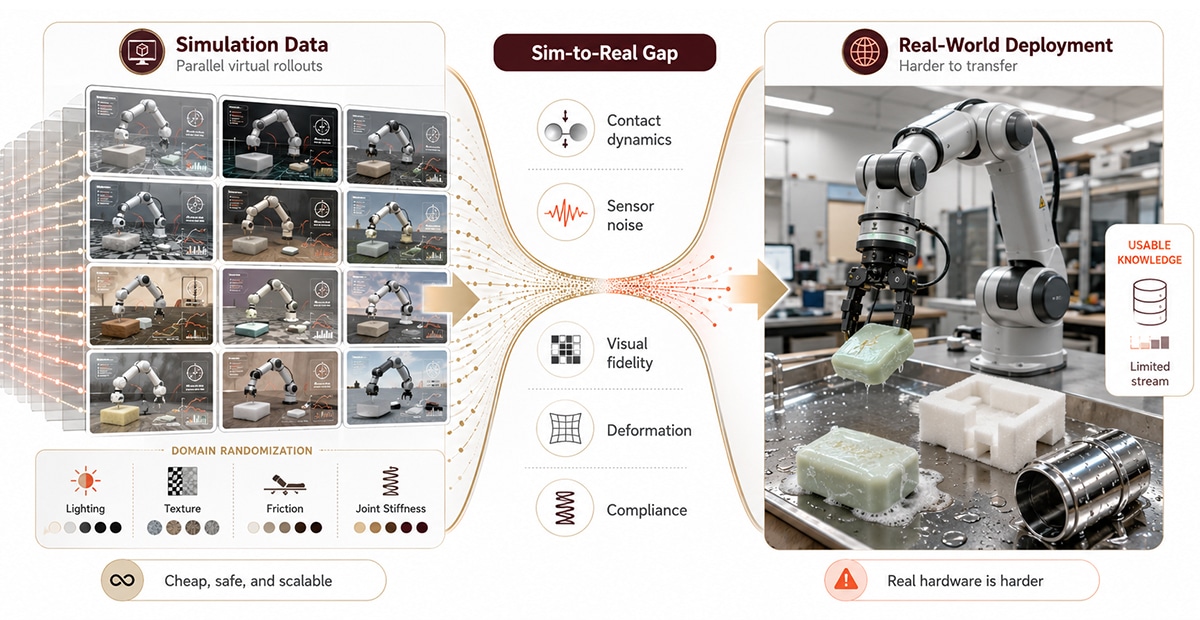
Simulation wins in scale and safety. Edge cases, collision failures, and dangerous configurations can all be tested without breaking the hardware. Domain Randomization – randomly varying the light, texture, friction, and stiffness of members during training – produces policies that survive real-world variation rather than overfitting into a single virtual configuration.
Sim-to-real gap: Performance degradation when a simulation-trained policy is applied to real-world hardware, often caused by communication dynamics, sensor noise, and visual fidelity differences.
Cost comes from usage. Simulators do not simulate the friction of a wet bar of soap, the yield of a foam package, or the visible variation of a special metal under fluorescent light. Contact-rich tasks are where sim-to-real tends to break down. A study published in 2025 estimated the trade-off: about 8 simulation samples bring the equivalent benefit of 1 teleoperated sample of internal manipulation activities (Law on the Use of Data for Robot Exploitation, 2025).
Graphics rendering platforms such as NVIDIA Cosmos and 3D Gaussian Splatting reduce the visual gap, but the dynamics gap – friction, distortion, compliance – is still a very difficult problem.
What is personal video data and what does it enable?
Human video data is footage of people performing manipulative tasks – folding clothes, packing dishes, assembling parts – taken from egocentric cameras, surveillance angles, or selected demonstration sets.
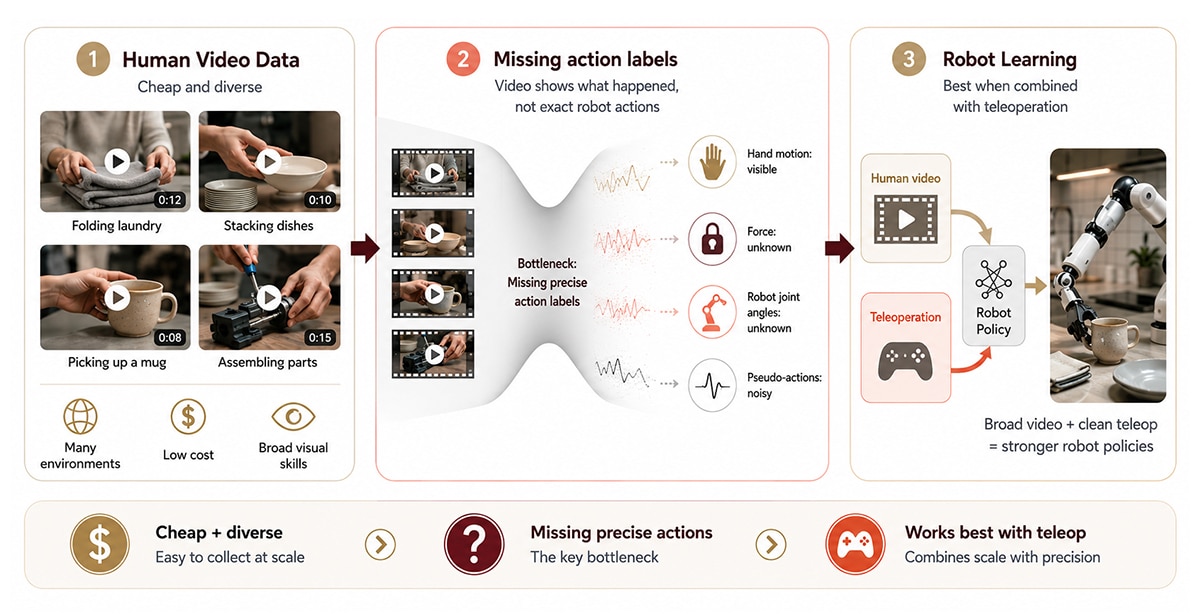
Human video wins on cost and variety. A single contributor with a smartphone can capture hundreds of demonstrations across kitchens, garages, factories, and offices in one afternoon. No robot required, no lab required, no user training required. Large-scale visual language models pre-trained on human video derive a general understanding of the scene that can be usefully transferred to robotic policies prior to fine-tuning.
A constraint is a missing action label. The video shows a hand holding a cup; they do not record the forces applied or the joint angles that the robot arm would need to reproduce the movement. Inverse dynamics models and hand-to-hand reorientation can reduce those labels a bit, but the resulting pseudo-actions carry noise.
Imagine the beginning of building a robot in the kitchen. They have $80,000 to spend. Twenty hours of skilled telework could buy them 200 clean cuts on their target arm. Twenty hours of donor video collection across various home kitchens buys them a few thousand egocentric clips. The phone set is sharp. The video set is extensive. A robot needs both, in different proportions for different stages of training.
Teleoperation vs simulation vs in-person video: a side-by-side comparison
How do you choose the right data strategy for integrated AI?
Choosing the right data strategy for robot training starts with the goal of the application, not the source of the data. A factory floor picking robot, a household humanoid, and a surgical assistant have very different requirements for reliability, safety, and human-likeness — and therefore a very different ideal data mix.
A three-step practical framework:
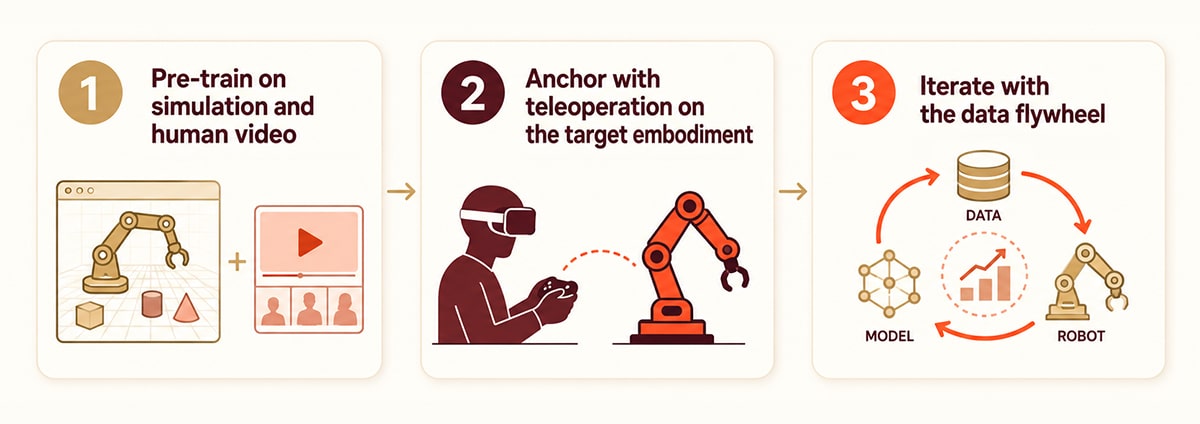
- Pre-cast train and human video. Use to simulate extensive coverage of scenes, objects, and security edge cases. A background in human video that focuses on the essentials of nature and real-world visual diversity. This category is cheap and wide.
- Apply by teleoperation to the target person’s image. Collect 500–2,000 high-quality teleop clips for the exact robot you plan to use. This phase is expensive but irreversible – it supports policy in real change.
- Combine with data flywheel. Once deployed, capture automatic releases and failure cases. Cook them back in the next training cycle next to the new teleop and human video.
Think of it like training a chef. Simulation is a school of instruction – broad, cheap, fault tolerant. A person’s video has watched thousands of cooking videos – a broad context, no your kitchen. Teleoperation is a hands-on internship in a real kitchen where you will work – slow, expensive, irreversible. No honest chef skips any of the three.
Shaip’s multimodal data collection and annotation workflow is designed to support all three layers – teleop cell operation, simulation labeling, and egocentric video collection through a global network of 500K+ contributors – so robotics teams can plan a hybrid strategy without tying up five vendors.
The conclusion
The teleoperation vs simulation vs human debate has a clear answer in 2026: it’s not an option, it’s a stack. Teleoperation gives you reliability. Simulation gives you scale. Human video gives you variety. Integrated AI pipelines for production include all three, weighted toward deployment direction, humanization, and budget. The teams that win the next decade of learning robotics won’t be the ones that choose the cheapest source – they’ll be the ones that plan the smartest mix.



